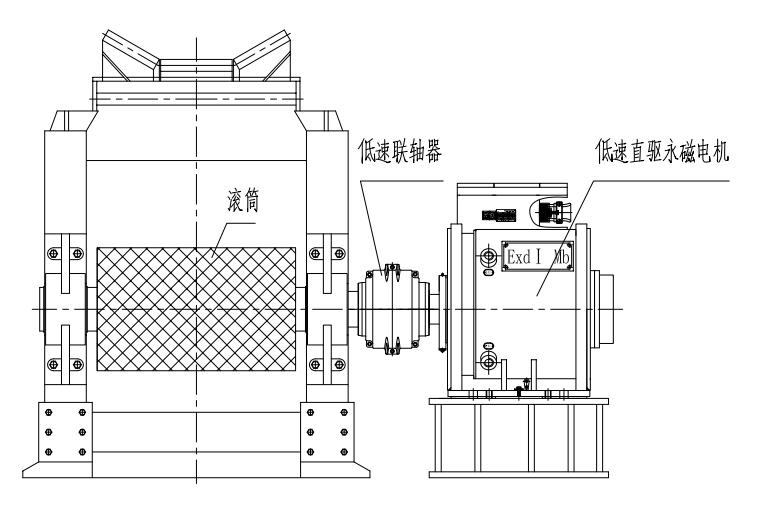
IE5 10000V TYZD ຄວາມໄວຕໍ່າຂອງ Direct-drive Loads Permanent Magnet Synchronous Motor

ສະເພາະຜະລິດຕະພັນ
| ແຮງດັນທີ່ຈັດອັນດັບ | 10000V |
| ລະດັບພະລັງງານ | 200-1400kW |
| ຄວາມໄວ | 0-300 rpm |
| ຄວາມຖີ່ | ຄວາມຖີ່ຂອງຕົວແປ |
| ໄລຍະ | 3 |
| ເສົາ | ໂດຍການອອກແບບດ້ານວິຊາການ |
| ຂອບເຂດ | 630-1000 |
| ການຕິດຕັ້ງ | B3,B35,V1,V3..... |
| ຊັ້ນຮຽນໂດດດ່ຽວ | H |
| ລະດັບການປົກປ້ອງ | IP55 |
| ຫນ້າທີ່ເຮັດວຽກ | S1 |
| ປັບແຕ່ງ | ແມ່ນແລ້ວ |
| ວົງຈອນການຜະລິດ | 30 ມື້ |
| ຕົ້ນກໍາເນີດ | ຈີນ |
ຄຸນສົມບັດຂອງຜະລິດຕະພັນ
•ປະສິດທິພາບສູງແລະປັດໄຈພະລັງງານ.
•ຄວາມຕື່ນເຕັ້ນແມ່ເຫຼັກຖາວອນ, ບໍ່ຕ້ອງການກະແສກະຕຸ້ນ.
•ການດໍາເນີນການ synchronous, ບໍ່ມີ pulsation ຄວາມໄວ.
•ສາມາດໄດ້ຮັບການອອກແບບເປັນແຮງບິດເລີ່ມຕົ້ນສູງແລະຄວາມອາດສາມາດ overload.
• ມີສຽງລົບກວນຕໍ່າ, ອຸນຫະພູມເພີ່ມຂຶ້ນ ແລະການສັ່ນສະເທືອນ.
•ການດໍາເນີນງານທີ່ເຊື່ອຖືໄດ້.
•ມີ inverter ຄວາມຖີ່ສໍາລັບຄໍາຮ້ອງສະຫມັກຄວາມໄວການປ່ຽນແປງ.
ຄໍາຮ້ອງສະຫມັກຜະລິດຕະພັນ
ຜະລິດຕະພັນຊຸດໄດ້ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນອຸປະກອນຕ່າງໆເຊັ່ນ: ໂຮງງານບານ, ເຄື່ອງສາຍແອວ, ເຄື່ອງປະສົມ, ເຄື່ອງຈັກສູບນ້ໍາມັນໄດໂດຍກົງ, ປັ໊ມ plunger, ພັດລົມ tower cooling, hoists, ແລະອື່ນໆ.




FAQ
ແບຣນຖືກທົດແທນແນວໃດ?
ທຸກໆມໍເຕີຂັບໂດຍກົງ synchronous ແມ່ເຫຼັກຖາວອນມີໂຄງສ້າງສະຫນັບສະຫນູນພິເສດສໍາລັບສ່ວນ rotor, ແລະການທົດແທນລູກປືນຢູ່ໃນບ່ອນແມ່ນຄືກັນກັບມໍເຕີ asynchronous. ການທົດແທນແລະບໍາລຸງຮັກສາລູກປືນຕໍ່ມາສາມາດປະຫຍັດຄ່າໃຊ້ຈ່າຍໃນການຂົນສົ່ງ, ປະຫຍັດເວລາການບໍາລຸງຮັກສາ, ແລະປົກປ້ອງຄວາມຫນ້າເຊື່ອຖືຂອງການຜະລິດຂອງຜູ້ໃຊ້ໄດ້ດີຂຶ້ນ.
ຈຸດສໍາຄັນຂອງການເລືອກມໍເຕີໄດໂດຍກົງແມ່ນຫຍັງ?
1. ຮູບແບບການໃຊ້ງານຢູ່ບ່ອນ:
ເຊັ່ນ: ປະເພດການໂຫຼດ, ສະພາບແວດລ້ອມ, ສະພາບຄວາມເຢັນ, ແລະອື່ນໆ.
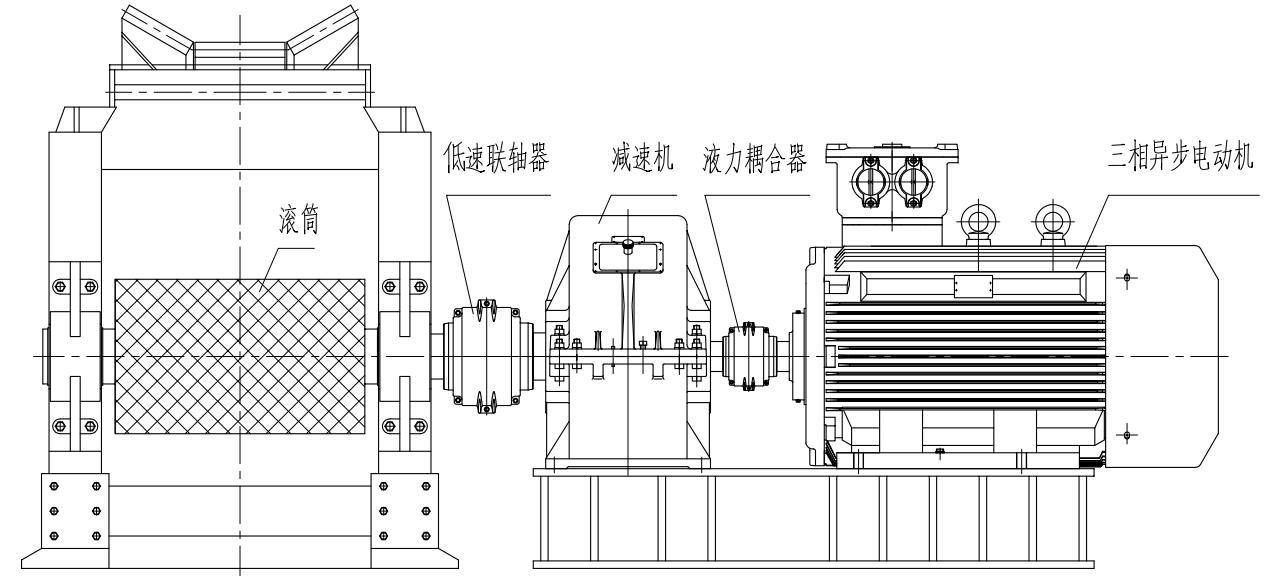
2. ອົງປະກອບແລະຕົວກໍານົດການກົນໄກການສົ່ງຕົ້ນສະບັບ:
ເຊັ່ນ: ຕົວກໍານົດການ nameplate ຂອງ reducer, ຂະຫນາດການໂຕ້ຕອບ, ຕົວກໍານົດການ sprocket, ເຊັ່ນ: ອັດຕາສ່ວນແຂ້ວແລະຂຸມ shaft.
3. ຄວາມຕັ້ງໃຈໃນການປັບປຸງໃຫມ່:
ໂດຍສະເພາະບໍ່ວ່າຈະເປັນການຂັບໂດຍກົງຫຼືຂັບເຄິ່ງໂດຍກົງ, ເນື່ອງຈາກວ່າຄວາມໄວຂອງມໍເຕີຕ່ໍາເກີນໄປ, ທ່ານຕ້ອງເຮັດການຄວບຄຸມວົງປິດ, ແລະບາງ inverters ບໍ່ສະຫນັບສະຫນູນການຄວບຄຸມວົງປິດ. ນອກຈາກນັ້ນ, ປະສິດທິພາບຂອງມໍເຕີແມ່ນຕ່ໍາ, ໃນຂະນະທີ່ຄ່າໃຊ້ຈ່າຍຂອງມໍເຕີແມ່ນສູງກວ່າ, ຄ່າໃຊ້ຈ່າຍທີ່ມີປະສິດທິພາບບໍ່ສູງ. ການປັບປຸງແມ່ນປະໂຫຍດຂອງຄວາມຫນ້າເຊື່ອຖືແລະການບໍາລຸງຮັກສາທີ່ບໍ່ມີການບໍາລຸງຮັກສາ.
ຖ້າຄ່າໃຊ້ຈ່າຍແລະປະຫຍັດຄ່າໃຊ້ຈ່າຍແມ່ນມີຄວາມສໍາຄັນກວ່າ, ມີບາງເງື່ອນໄຂທີ່ການແກ້ໄຂການຂັບລົດເຄິ່ງໂດຍກົງອາດຈະເຫມາະສົມໃນຂະນະທີ່ຮັບປະກັນການບໍາລຸງຮັກສາຫຼຸດລົງ.
4. ການຄວບຄຸມຄວາມຕ້ອງການ:
ບໍ່ວ່າຈະເປັນຍີ່ຫໍ້ inverter ບັງຄັບ, ບໍ່ວ່າຈະເປັນ loop ປິດແມ່ນຕ້ອງການ, ບໍ່ວ່າຈະເປັນ motor ກັບໄລຍະການສື່ສານ inverter ຄວນມີການຕິດຕັ້ງຕູ້ຄວບຄຸມເອເລັກໂຕຣນິກ, ຫນ້າທີ່ຂອງຕູ້ຄວບຄຸມເອເລັກໂຕຣນິກຄວນມີ, ແລະສິ່ງທີ່ສັນຍານການສື່ສານຈໍາເປັນຕ້ອງມີສໍາລັບ DCS ໄລຍະໄກ.




